Рис. 19. Схема контрольного устройства для дежурного робота
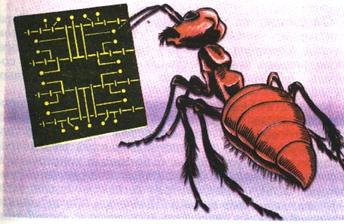
Моделирование радиоэлектронных робототехнических устройств на микросхемах. Самыми совершенными радиоэлектронными модулями являются интегральные микросхемы, содержащие в небольшом объёме очень большое число радиодеталей. На рис. 20 показан кристалл микросхемы рядом с муравьём. Не правда ли, впечатляющее сравнение?
Если вы хорошо усвоили все предыдущее, то сумеете работать и с микросхемами. Здесь придётся пользоваться специальным паяльником с очень тонким жалом, пинцетом и другими миниатюрными инструментами. С микросхемами надо обращаться очень аккуратно и грамотно.
Устройства, собранные на микросхемах, как правило, не требуют налаживания и конструктивно выглядят весьма простыми. Большой популярностью пользуются микросхемы серии К155, выполненные на основе транзисторно – транзисторной логики (ТТЛ). В этой серии есть многовходовые элементы И – НЕ, триггеры, счётчики, дешифраторы, запоминающие и другие устройства.
Чтобы помочь читателям освоить микросхемы и приступить к сознательному моделированию микроэлектронных робототехнических устройств, разработан и выпускается промышленностью «Конструктор для изучения микросхем и логических основ построения ЭВМ» (рис. 21). Он очень прост и может быть выполнен дома или в кружке робототехники. Этот конструктор позволяет на одной из самых распространённых микросхем К155 Л A3, состоящей из четырёх логических элементов 2И – НЕ, проделать десятки экспериментов.