1. Новый принцип устройства двигателей и трансформаторов переменного тока[3]
Я желал бы высказать свою благодарность профессору Энтони за оказанную помощь. Мне также хотелось бы поблагодарить м-ра Поупа и м-ра Мартина за поддержку. У меня не было достаточно времени, чтобы подготовиться лучше и охватить предмет шире, как я бы того хотел, к тому же здоровье мое сейчас не самое лучшее. И потому прошу о снисхождении и надеюсь, что то немногое, что я хочу представить вашему вниманию, заслужит одобрение.
Сейчас, когда существует столько мнений по поводу относительных достоинств систем, использующих переменный и постоянный токи, большое значение придается тому, можно ли успешно использовать переменный ток для работы двигателей. Трансформаторы, обладая множеством преимуществ, дали нам относительно совершенную систему распределения, и хотя, как и во всех областях знания, многое еще требует совершенствования, проделать в этом направлении осталось сравнительно немного. Передача же электроэнергии почти полностью происходит с помощью постоянного тока, и, несмотря на все затраченные усилия использовать для этих целей переменный ток, насколько известно, желаемого результата достигнуто не было. Из множества двигателей, работающих от переменного тока, можно упомянуть следующие: 1. Двигатель с последовательным возбуждением и разделенным полем. 2. Генератор переменного тока, чье поле возбуждается постоянными токами. 3. Двигатель Элью Томсона. 4. Комбинированный двигатель постоянного и переменного тока. Еще два двигателя этого типа вспомнились мне: 1. Двигатель, где одна обмотка соединена последовательно с трансформатором, а другая — со вторичной обмоткой трансформатора. 2. Двигатель, где обмотка якоря подключена к источнику тока, а обмотка возбуждения закорочена. Об этих двигателях я, однако, заметил только вскользь.
Предмет, который я имею удовольствие представить вашему вниманию, — это новая система распределения и передачи энергии переменными токами, имеющая особые преимущества, в особенности по отношению к двигателям, которые, в чем я уверен, будучи внедренными, покажут превосходное согласование с этими токами и результаты, ранее недостижимые без их использования, результаты, которые особенно желаемы для практики и которые не могут быть получены средствами постоянных токов.
Прежде чем углубиться в подробное описание этой системы, я полагаю необходимым сделать несколько замечаний касательно определенных условий, существующих для генераторов и двигателей постоянного тока, которые, хотя и широко известны, часто игнорируются.
Наши динамо-машины, и это хорошо известно, производят переменный ток, который мы выпрямляем посредством коллектора, сложного устройства и, скажем прямо, источника почти всех неприятностей при эксплуатации машин. Таким образом, полученные постоянные токи нельзя использовать в машинах, они должны быть — опять-таки при помощи подобного ненадежного устройства — преобразованы в свое первоначальное состояние — переменный ток. Функции, которые выполняет коллектор, носят внешний характер, и он ни в коем случае не воздействует на внутренний процесс работы машины. Следовательно, в действительности все машины — это машины переменного тока, а постоянными они являются только на участке внешней цепи при переходе от генератора к двигателю. Поэтому и только поэтому переменный ток более предпочтительное воплощение электроэнергии, а использование постоянного тока может быть оправдано только в том случае, если у нас имеются динамо-машины, которые вырабатывают, и двигатели, которые непосредственно используют такой ток.
Но действие коллектора двигателя двойное: во-первых, он реверсирует ток через двигатель и, во-вторых, он действует автоматически, поступательно сдвигая полюса одной из магнитных составляющих.
Осознав, что эти операции в системе бесполезны, необходимо заявить, что выпрямление переменного тока генератора и изменение направления тока в двигателе должны быть исключены, чтобы вызвать вращение двигателя, необходимо обеспечить поступательное смещение полюсов одного из его элементов.
И тогда сам по себе встает вопрос: Как этого добиться при помощи прямого действия переменного тока? Далее я расскажу, как мы пришли к такому эезультату.
В первом эксперименте барабан якоря состоял из двух пар катушек, расположенных друг к другу под прямым углом, а концы этих обмоток соединялись с двумя парами изолированных контактных колец как обычно. Кольцо изготовлено из тонких изолированных пластин листовой стали, на которое намотаны четыре катушки, каждые две противоположные катушки соединены последовательно, чтобы создать свободные полюсы на диаметрально противоположных сторонах кольца. Свободные концы катушек соединены с контактными кольцами ротора генератора так, чтобы образовать две независимые цепи, как показано на рисунке 9. Теперь понятно, для чего были предприняты такие действия, и я перехожу к диаграммам, то есть рисункам с 1 по 8а. При вращении ротора в генераторе с независимым возбуждением в катушках СС возникает ток, изменяющийся по величине и направлению в соответствии с хорошо известным законом. В положении, показанном на рисунке 1, ток в обмотке С равен нулю, в то время как катушка С пересечена максимальным магнитным потоком и подключения могут быть такими, что кольцо статора будет намагничено катушками CtCf так, как это обозначено символами NS на рисунке 1а. Эффект намагничивания от катушек СС равен нулю, так как эти катушки включены в цепь катушки С.

На рисунке 2 обмотки якоря показаны повернутыми на одну восьмую оборота. Рисунок 2а показывает соответствующее магнитное состояние кольца. В этот момент обмотка с, вырабатывает ток того же направления, что и прежде, но слабее, в то же время образовывая на кольце полюсы обмотка с также вырабатывает ток того же направления, причем соединения таковы, что витки сс образовывают полюсы ns, как показано на рисунке 2а. Результирующая полярность обозначается буквами NS и следует помнить, что полюсы кольца сдвинуты на одну восьмую относительно окружности.
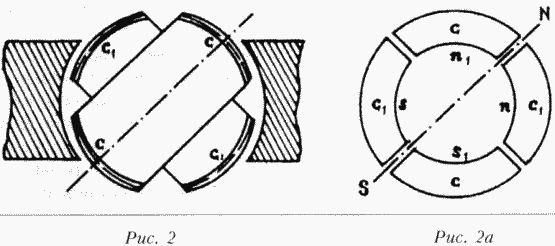
На рисунке 3 якорь [ротор] завершил оборот на одну четверть. В этой фазе ток в обмотке С максимальный и такого направления, чтобы создать полюсы NS (на рисунке За), поскольку ток в обмотке С, равен нулю и контур находится в нейтральном положении. Полюсы NS, таким образом, сдвинуты на одну четверть по отношению к окружности кольца[4] [ротора].
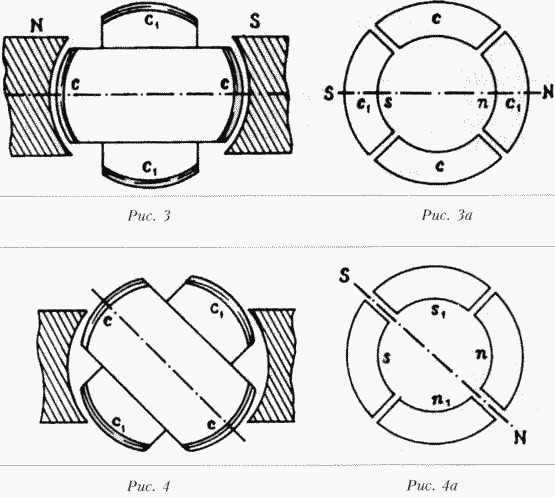
Рисунок 4 показывает обмотку С С в еще более сдвинутом положении, когда якорь завершил оборот на три восьмых. В этот момент обмотка С всё гще вырабатывает ток того же направления, как и прежде, но слабее, в то же время образуя сравнительно слабые полюсы ns (на рисунке 4а). Ток в обмотке С той же силы, но обратного направления. Результат этого, следовательно, в образовании на кольце полюсов п1 и s1 как показано на рисунке, и полярности NS, причем полюсы теперь сдвинуты на три восьмых по отношению к окружности кольца.
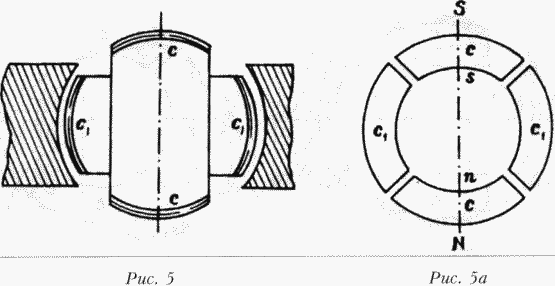
На рисунке 5 показано, что якорь завершил оборот наполовину, а результирующее магнитное состояние кольца показано на рисунке 5а. Теперь ток в обмотке С равен нулю, в то время как обмотка С1 вырабатывает наиболее сильный ток того же направления, что и прежде; намагничивание сейчас производят витки с1 с1 и только они, как показано на рисунке 5а, причем следует помнить, что полюсы NS сдвинуты по отношению к окружности кольца наполовину. Во время второй половины оборота все действия повторяются, как показано на рисунках с 6 по 8а.
Рисунки помогают понять, что во время одного оборота якоря генератора полюсы кольца один раз оборачиваются по окружности и каждый оборот производит одинаковый результат, при этом полюсы вращаются очень быстро, находясь в согласии с вращением якоря. Если реверсировать подключение одной из обмоток, то направление вращения полюсов изменится на противоположное направление, но действия при этом будут совершаться те же. Вместо того чтобы использовать четыре провода, с тем же успехом можно использовать три, причем один будет обратным для обоих контуров.


Это перемещение, или вращение полюсов, проявляется в ряде любопытных явлений. Если стальной диск или диск, изготовленный из любого другого магнитного металла, аккуратно насаженный на какую-либо ось, поднести к кольцу, он начинает быстро вращаться, причем направление вращения изменяется в зависимости от положения диска. Например, снаружи и изнутри кольца он движется в противоположных направлениях, оставаясь в покое в положении, симметричном кольцу. Это легко объяснить. Каждый раз при приближении полюса, этот полюс индуцирует на ближайшей точке диска противоположный полюс и возникает притяжение; благодаря этому полюс сдвигается далее и возникает тангенциальное притяжение. Действие повторяется

Рис. 9
вновь и вновь, в результате чего имеем более или менее быстрое вращение диска. Поскольку сила притяжения действует на ту часть диска, которая ближе всего к кольцу, то вращение внутрь и наружу, то есть вправо и влево происходит в разных направлениях, как показано на рисунке 9. Если диск помещен симметрично кольцу, то сила притяжения по обеим сторонам его одинакова, и вращения не происходит.
Это действие основано на магнитной инерции железа; по этой причине большему влиянию подвержен диск из твердой стали, нежели диск из мягкого железа. Последний способен изменять магнитные поля. Такой диск оказался очень полезным инструментом в проводимых исследованиях, так как позволял мне заметить все особенности происходящих событий. Любопытное воздействие также испытывают на себе железные опилки. Если насыпать немного опилок на бумагу и поднести к внешней стороне кольца поближе, то можно заметить, что они начинают колебаться, оставаясь в то же время на месте, даже если лист бумаги двигать взад и вперед; но если поднять лист на определенную высоту, которая зависит от интенсивности полюсов и скорости вращения, опилки разлетаются в стороны в направлении, обратном предполагаемому вращению полюсов. Если лист бумаги с опилками положить плашмя на кольцо и внезапно подать ток, можно легко пронаблюдать существование магнитных вихрей.
Для того чтобы продемонстрировать полное сходство между кольцом и вращающимся магнитом, сильный электромагнит механически вращали, при этом наблюдались все явления, идентичные описанным выше.
Очевидно, что вращение полюсов вызывает явление индукции и может быть использовано для выработки тока в замкнутом проводнике, помещенном в магнитное поле. Для этой цели удобно намотать на кольцо две наложенные друг на друга обмотки, которые образуют соответственно первичный и вторичный контуры, как показано на рисунке 10. Чтобы добиться наиболее экономичных результатов, магнитная цепь должна быть полностью замкнута и видоизменена в зависимости от конкретных условий.

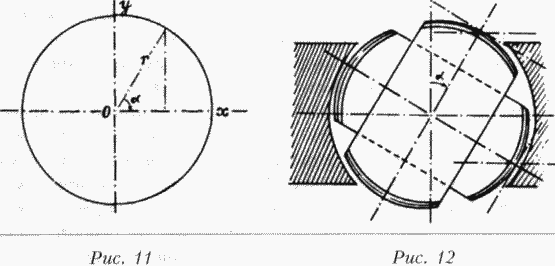
Эффект индукции, наблюдающийся во вторичной обмотке объясняется главным образом сдвигом или движением магнитного поля; но токи в цепях могут возникать также и вследствии изменений напряженности полюсов. Однако если правильно сконструировать генератор и определить магнитный эффект первичной обмотки, от последнего явления можно избавиться. Если поддерживать постоянную напряженность магнитного поля, то действие прибора будет идеальным и мы будем иметь тот же результат, как если бы сдвиг происходил при помощи коллектора с бесконечно огромным числом пластин. В этом случае теоретически соотношение между магнитным воздействием каждого витка первичной обмотки и их результирующим магнитным действием можно выразить как уравнение окружности, центр которой совпадает с центром прямоугольной двухосной системы координат, и радиус которой есть результирующая величина и координаты обеих составляющих. Они есть соответственно синус и косинус угла а между радиусом и одной из осей (ОХ). Взглянув на рисунок 11, увидим, что r 2=х2+у2, где x=r cos а, a y=r sin а.
Допустим, что намагничивание каждой из обмоток в трансформаторе пропорционально силе тока — что можно допустить для малых величин намагничивания, — тогда х=Кс, а у=Кс1 где К — величина постоянная, а с и с1 - величины силы тока в обеих обмотках. Если предположить далее, что поле в генераторе однородно, то для постоянной скорости с=К1 sin a, a c=K1 sin (90° + a)=K1 cos а, где K1 — величина постоянная (см. рисунок 12). Следовательно, х = Кс = КК1 cos а; у = Кс1 = KK1 sin а, и КК = r.
Это означает, что в однородном поле расположение обмоток под прямым углом обеспечит теоретический результат, а напряженность двигающихся полюсов будет постоянной. Но из выражения r 2= х2+у2 следует, что у=0, r=х, т. е. совокупное намагничивание обеих обмоток равно по величине магнитному действию одной обмотки в точке максимума. В трансформаторах и в некоторых типах моторов флуктуации полюсов не имеют особого значения, но в других типах моторов желательно иметь теоретический результат.
После применения этого принципа на практике были созданы два типа моторов. Первый тип характеризуется сравнительно слабым вращательным действием в начале работы, но затем поддерживает постоянную скорость при любой нагрузке. Этот двигатель назван синхронным. Второй тип создает хорошее усилие вначале, но скорость его вращения зависит от нагрузки.
Эти моторы могут приводиться в действие тремя способами: 1. Только от источника переменного тока. 2. От совместного действия переменных и наведенных токов. 3. От совместного действия переменного и постоянного тока.
Простейший синхронный двигатель можно получить, если взять кольцо из тонкого проката, снабженное четырьмя обмотками, служащими полюсами, и соединить таким же способом, как показано [рисунок 9]. Железный диск с удаленными по обеим сторонам секторами может служить якорем. Такой двигатель показан на рисунке 9. Если диску позволить свободно двигаться внутри кольца в непосредственной близости от полюсов, очевидно, что поскольку полюсы перемещаются, он, вследствие своего стремления находиться в точке, где есть наибольшее количество силовых линий, будет точно следовать движению полюсов и его движение будет синхронным движению полюсов якоря генератора, т. е. в определенном положении, показанном на рисунке 9, в котором один оборот якоря производит два импульса тока в каждом контуре. Очевидно, что если при одном обороте производится большее количество импульсов, то и скорость вращения мотора возрастает. Если допустить, что сила притяжения, оказываемая на диск, наиболее велика, когда он ближе всего к полюсам, то понятно, что такой мотор будет работать с одинаковой скоростью при всех нагрузках в пределах своей мощности.
Для облегчения запуска диск можно снабдить обмоткой, замкнутой на себя. Преимущество использования подобной обмотки очевидно. При запуске токи, возбуждаемые в обмотке, сильно электризуют диск и увеличивают силу притяжения, с которой кольцо воздействует на него; и в то время, как токи возбуждаются в обмотке, пока скорость вращения якоря меньше скорости вращения полюсов, двигатель может совершать приличную работу даже до того, как наберет необходимые обороты. Если учесть, что напряженность полюсов постоянна, то никаких токов не будет вырабатываться в обмотке, когда двигатель вращается с нормальной скоростью.
Вместо того чтобы замыкать обмотку на себя, ее выводы можно соединить со скользящими контактными кольцами и с соответствующего источника подать на них постоянный ток. Чтобы запустить такой двигатель, надо сначала замкнуть обмотку на себя, а затем, когда скорость вращения станет нормальной или почти нормальной, подать постоянный ток. Если диск будет сильно намагничен постоянным током, двигатель может не запуститься, а если он будет слабо намагничен, или в целом магнитное воздействие кольца будет преобладающим, то он запустится и наберет нормальные обороты. Такой двигатель вращается с абсолютно одинаковой скоростью при любой нагрузке. Было также замечено, что, если движущая сила генератора не слишком высока, то при проверке мотора, скорость генератора уменьшается синхронно со скоростью вращения мотора. Характерной чертой этого двигателя является то, что направление вращения не меняется в зависимости от перемены полярности источника постоянного тока.
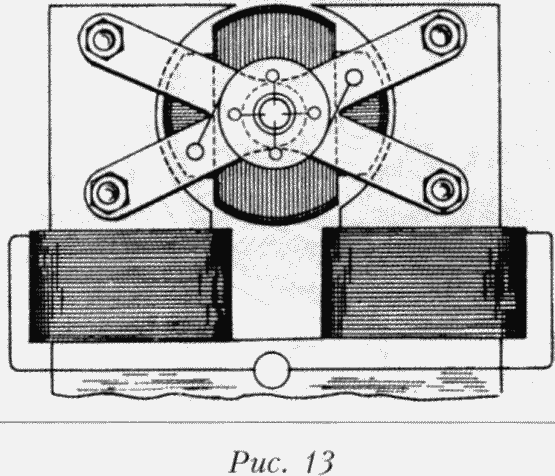
Синхронность этих моторов можно по-разному продемонстрировать экспериментальным путем. Для этой цели лучше всего взять мотор, который состоит из стационарного магнита и якоря, который вращается в поле магнита, как показано на рисунке 13. В данном случае перемещение полюсов якоря заставляет его вращаться в противоположном направлении. В результате, при достижении нормальной скорости вращения, полюсы якоря принимают фиксированное положение относительно поля магнита, и он намагничивается индукционно, причем полярность ярко выражена. Если кусок мягкого железа поднести к магниту, то поначалу он притягивается и вибрирует, причем эта вибрация порождается изменением полярности магнита, но по мере увеличения скорости вращения якоря вибрация всё уменьшается и в конце концов затухает совсем. Тогда сила притяжения железа невелика, но постоянна, что показывает, что синхронность достигнута и магнит питается индукционно.
Диск тоже можно использовать для такого опыта. Если поднести его довольно близко к якорю, он будет поворачиваться до тех пор, пока скорость вращения полюсов превышает скорость вращения якоря; но как только будет достигнута нормальная скорость или около того, он перестает вращаться и постоянно притягивается.
Грубый, но очень показательный пример дает нам лампа накаливания. Если включить ее в цепь с источником постоянного тока последовательно с магнитной катушкой, то можно наблюдать быстрые флуктуации в виде мигания света, которые находятся в соответствии с наведенными токами в катушке, которые существуют поначалу; но с увеличением скорости, мигание становится всё реже и реже и прекращается совсем, указывая на то, что двигатель набрал обороты.
Телефонный аппарат — это наиболее чувствительный прибор; если его соединить в цепь с любым мотором, то синхронизм можно легко обнаружить по затуханию наведенных токов.
В двигателях синхронного типа предпочтительно поддерживать движущееся магнитное поле на постоянном уровне, в особенности, если магниты не разделены должным образом.
Как обеспечить хорошее тяговое усилие, вот, что долго занимало умы. Для того чтобы добиться такого результата, необходимо было создать конструкцию, где полюсы одной части мотора движутся благодаря переменному току источника, а полюсы, возникающие в другой его части, должны всегда находиться в соответствии с ними, независимо от скорости вращения мотора. Такое условие соблюдается в электродвигателях постоянного тока. Но в синхронном двигателе, который мы описываем, это условие соблюдается только при нормальной скорости вращения.
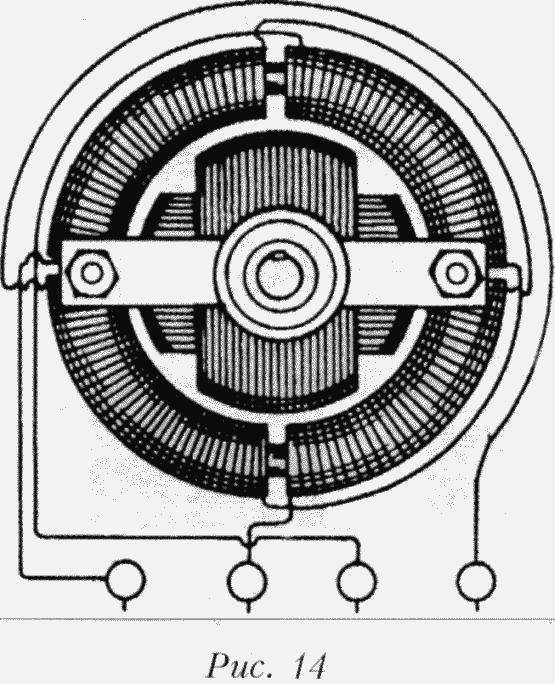
Этой цели удалось достичь, поместив внутрь кольца стальной сердечник с несколькими независимыми обмотками, замкнутыми на себя. Двух обмоток, расположенных под прямым углом друг к другу, как показано на рисунке 14, вполне достаточно, но чем их больше, тем лучше. Из такой конструкции следует, что, когда полюсы кольца движутся, в замкнутых обмотках якоря возникают токи. Эти токи наиболее сильны в точках, где более всего силовых линий поля, и их действие таково, что они создают полюсы на якоре под прямым углом к полюсам кольца, по крайней мере теоретически; и поскольку это происходит независимо от скорости вращения, т. е. что касается расположения полюсов, — окружность кольца постоянно подвергается действию силы притяжения. Во многих отношениях эти моторы похожи на моторы постоянного тока. Если подключить нагрузку, то скорость, а также сопротивление мотора уменьшаются и через электризующие обмотки проходит ток большей силы, что увеличивает мощность. После того, как убрали нагрузку, возрастает противоэлектродвижущая сила, и сила тока в первичных обмотках уменьшается. Без нагрузки скорость вращения равна или примерно равна скорости вращения полюсов магнита.
Позже было обнаружено, что тяговое усилие в таких моторах полностью равно усилию в моторах постоянного тока. Кажется, что усилие достигает наибольшей величины, когда на якоре и на магните отсутствуют выступы; но так как при такой конструкции поле не может достигать высокой концентрации, вероятно, наилучшего результата можно достичь, когда выступами снабжен один из элементов системы. В общем, можно сделать вывод, что выступы уменьшают вращающий момент и улучшают синхронизацию.
Характерной чертой этого типа двигателей является их способность очень быстро менять направление вращения. Это есть следствие особенности в работе мотора. Допустим, что якорь вращается, и направление вращения полюсов меняется. В этом случае наш аппарат представляет собой динамо-машину, причем энергией для движения этой машины служит кинетическая энергия движения якоря, а скорость его вращения — это сумма скоростей якоря и полюсов. Если мы допустим, что количество энергии, необходимое для вращения такой динамо-машины будет пропорционально одной трети скорости, то уже только по этой причине направление вращения якоря можно быстро изменить. Но одновременно с этим вступает в действие другой фактор, а именно: так как направление вращения полюсов по отношению к якорю изменилось, двигатель начинает действовать как трансформатор, в котором сопротивление вторичной обмотки ненормально уменьшено вследствие образования в ней дополнительной электродвижущей силы. Благодаря этим двум причинам реверс становится моментальным.
Существует несколько различных способов достижения постоянной скорости вращения и хорошего тягового усилия при запуске. Например, два якоря, один для вращающего момента, а другой для синхронизации, могут быть установлены совместно и при необходимости использоваться, или якорь можно раскручивать для достижения вращательного усилия, но более или менее внушительного результата по улучшению синхронизации можно достичь, если правильно сконструировать железный сердечник, или множеством иных способов.
Для достижения необходимой фазы токов в обеих цепях проще всего расположить две катушки под прямым углом — это очевидный подход; но такой же результат можно получить множеством других способов в зависимости от применяемой машины.
Любая из современных динамо-машин может быть приспособлена для этих целей, если вывести контакты в нужных местах обмотки генератора. На якоре с замкнутым контуром, таком, какой используется в двигателе постоянного тока, лучше всего сделать четыре вывода в равноудаленных местах или пластинах коллектора и соединить их с четырьмя изолированными контактными кольцами на валу. В этом случае каждый из контуров мотора соединяется с двумя диаметрально противоположными пластинами коллектора. В таком виде двигатель можно эксплуатировать в половину мощности и по трехпроводной схеме, соединив контуры мотора в надлежащем порядке с тремя контактными кольцами.
В многополюсных динамо-машинах, таких, какие используются в преобразовательных системах, требуемая фаза получается путем наматывания двух серий катушек таким образом, чтобы в то время, как витки одной секции или серии создавали максимальный ток, витки другой находились в нейтральной позиции или около того, вследствие чего обе секции обмоток могут подвергаться одновременно или последовательно действию магнитного поля.
В основном цепи двигателей могут быть расположены подобным образом и их реализация может быть различной в зависимости от конкретных требований, но самый простой и практичный способ — снабдить неподвижную часть мотора первичной обмоткой, таким образом удается избежать применения скользящих контактов. В этом случае обмотки магнита в обоих контурах соединяются попеременно, т. е. 1,3,5… в одном и 2,4,6… в другом, и обмотки каждой цепи могут соединяться одинаково или, напротив, попеременно; в последнем случае мы будем иметь двигатель с числом полюсов вдвое меньшим и работать он будет по-другому. Рисунки 15, 16 и 17 показывают три различные фазы, причем обмотки магнита в каждом контуре соединены попеременно оппозитно. В данном случае всегда будем иметь четыре полюса, как на рисунках 15 и 17, четыре зубца будут нейтральны, а на рисунке 16 два расположенных рядом зубца имеют одинаковую полярность. Если обмотки соединены одинаково, то имеем восемь попеременных полюсов, как обозначено буквами n's' на рисунке 15.

Применение многополюсных моторов дает преимущество столь необходимое, сколь недостижимое в двигателях постоянного тока, а именно: можно сделать так, чтобы двигатель работал с заданной скоростью независимо от недостатков конструкции, нагрузки и, в определенных пределах, электродвижущей и силы тока.
В общей системе распределения, как эта, следует придерживаться такой схемы. В качестве центрального источника надлежит использовать генератор со значительным числом полюсов. Двигатели, питающиеся от этого генератора, должны быть синхронными, но обладать значительным вращательным моментом для надежного запуска.
При соблюдении требований к конструкции можно будет заметить, что скорость вращения каждого мотора находится в обратной зависимости от его габаритов, таким же образом следует подходить к выбору числа полюсов. Однако особые требования могут внести изменения в это правило. С учетом этого хорошо было бы снабдить каждый мотор большим числом полюсных зубцов и обмоток, их количество должно быть кратным двум или трем. Это поможет простым изменением соединений обмоток адаптировать мотор для конкретных требований.
Если число полюсов в двигателе четное, то он будет работать плавно, и вы достигнете нужного результата; если же это не подходит, то лучше всего удвоить число полюсов и соединить их, как было описано выше, так, чтобы выходила половина числа пар полюсов. Например, у генератора 12 полюсов, а нужно получить скорость 12/7 скорости генератора. Для этого потребуется мотор с семью зубцами или магнитами, а такой мотор нельзя правильно соединить в цепь, если только не использовать 14 обмоток якоря, а это потребует применения скользящих контактов. Во избежание этого мотор должен иметь четырнадцать магнитов, включая по семь в каждую цепь попеременно. Якорь должен иметь четырнадцать замкнутых катушек. Мотор не будет работать идеально, как с четным числом полюсов, но, по крайней мере, его недостаток не будет столь серьезным.
Однако недостатки, являющиеся следствием такой несимметричной формы, уменьшатся в той же пропорции, в какой увеличится число полюсов. Если генератор имеет, скажем, п, а мотор га. полюсов, то скорость мотора будет равна скорости генератора, умноженной на дробь п/п1.
Скорость вращения мотора в целом зависит от количества полюсов, но возможны исключения. Скорость может меняться в зависимости от фазы тока в контурах или от характера импульса тока, или от интервала между импульсами, или от групп импульсов. Некоторые возможные случаи показаны на рисунках 18, 19, 20, 21, из которых всё ясно. На рисунке 18 показано наиболее часто встречающееся положение дел, когда достигается наилучший результат.
В таком случае, если применяется типичный двигатель, показанный на рисунке 9, одна полная волна в каждом контуре дает один полный оборот двигателя. На рисунке 19 такой же результат обеспечен одной волной в каждом контуре, когда импульсы следуют друг за другом, на рисунке 20 — четырьмя, а на рисунке 21 — восемью волнами.
Такими средствами можно достигать любой скорости, конечно, в пределах практических нужд. Эта система имеет еще одно преимущество, помимо прочих, — оно заключается в ее простоте. При полной нагрузке моторы показывают КПД, идентичный моторам постоянного тока. Трансформаторы демонстрируют дополнительное преимущество своей способностью питать двигатель. Они могут быть подобным же образом модифицированы и это облегчит внедрение моторов и их адаптацию для практических нужд. Их КПД должен быть выше, чем у современных, и вот на чем я основываю свое мнение.
В нынешнем трансформаторе, мы производим ток во вторичной обмотке путем изменения силы первичных токов или токов возбуждения. Если мы допустим пропорциональность по отношению к железному сердечнику, то индукция во вторичной обмотке будет пропорциональна суммарному количеству вариаций силы тока возбуждения за единицу времени; из чего следует, что для данной вариации любое увеличение продолжительности первичного тока ведет к пропорциональной потере. Для того чтобы получить быстрые изменения силы тока, что существенно для эффективной индукции, применяются волнистые поверхности. Это практически приводит лишь к недостаткам. Например, таким: увеличение стоимости и уменьшение КПД генератора, энергопотери при нагревании сердечников, а также уменьшение мощности трансформатора, так как сердечник используется нерационально, и реверсирование тока слишком быстрое. На определенных фазах индукция слишком мала, что будет видно из представленных графиков, возможны периоды бездействия, если есть интервалы между последовательными импульсами тока и волнами. При сдвиге полюсов в трансформаторе, а следовательно, и индукционных токов, индукция носит идеальный характер, оказывая максимальное воздействие. Разумно было бы также предположить, что сдвиг полюсов приведет к меньшим энергопотерям, чем реверсирование тока.
